


在常规动力吸盘中,因为有是在该边界处的大的压力差,该真空将容易泄漏,并且当放置在不完全光滑的表面时容易掉落。但是,由于在新系统中消除了这种差异,所以无论表面如何纹理化,都不会发生此类泄漏。而且,与传统系统相比,ZPD所需要的额外功能是维持给定吸力所需的动力要少得多。整个单元也比传统模型更小,更轻。
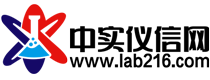
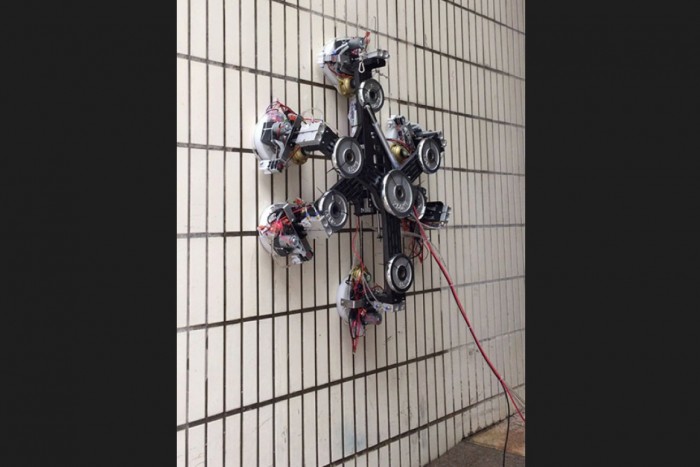
到目前为止,三种尺寸的ZPD杯子已经在可抓握物体的机械臂,可以供人们爬墙的“蜘蛛人”设备以及六脚爬壁机器人上进行了成功测试。后者引起了人们的兴趣。
“与其他攀爬机器人相比,带有我们基于ZPD的吸盘单元的机器人在性能上实现了令人惊讶的提升,”李昕说道。“这项研究的下一步是减少水的消耗。如果可以减少水的消耗,则吸盘装置将在少量水的情况下工作很长时间,以便攀岩机器人可以自己携带水而不是连接到电源。”
爬壁机器人具有广泛的潜在应用,包括建筑检查和维护,以及灾难现场的搜救任务。实际上,机器人可能必须在墙壁上的障碍物上导航,以及在不同方向上过渡到墙壁。机器人最艰巨的任务是能够爬上墙顶并穿过山顶到达另一侧--Leech已经实现了这个被认为是世界第一的自由运动。
Fumiya Iida博士说:“爬升机器人具有广泛的潜在应用,包括建筑物检查,维护,施工和搜索和救援任务。攀爬机器人在理论和实践上仍然是一个具有挑战性的研究领域,但我们共同制造通过创造一个受水蛭启发的机器人,可以从一个表面过渡到另一个表面并且可以在没有任何限制的情况下攀爬垂直墙,从而推动这一领域的重大贡献。
“这个项目是基于与访问博士生Ayato Kanada的合作。我们的论文展示了TUT新颖的执行器技术与我们的理论软机器人框架的成功协同作用,”他补充道。
研究小组利用淋浴软管的管结构设计了一种新的运动机构,以模拟水蛭的有利特性,即轻便,灵活和可扩展。机器人具有由三个并联连接的柔性管组成的主体。通过控制由齿轮供给的每个柔性管的长度,主体可以弯曲或伸长。
TUT的博士课程学生,该研究的主要作者Ayato Kanada在家中的浴室里提出了LEeCH的想法。“当我无意中最大限度地打开水龙头的时候,淋浴软管似乎有了生命。然后我想到如果我可以操纵一根软管,我就可以制造一个动态运动的机器人。生物,“他说。
该团队现在正在考虑通过将流体注入腔体来改变管子刚度的可能性。陆地水蛭的身体是如此轻盈和柔软,以至于它们不会在从高处坠落时受到巨大伤害。同样,具有柔性车身结构的机器人不仅能够很好地适应环境,而且还能够承受碰撞。因此,重量轻且灵活是攀爬机器人安全和生存所必需的。